2019 IROS--终生机器视觉数据集全球挑战赛

IEEE智能机器人与系统国际会议(IROS)是智能机器人与自动化领域的两个顶级国际会议之一,每一届IROS会议及其展会的举办都获得了极大的成功,对相关领域的技术发展起到了重要的促进作用。IROS 2019是IROS第32届会议,由全球最大的非营利性专业技术学会IEEE、IEEE机器人与自动化学会、IEEE工业电子学会、日本机器人学会、仪器与控制工程师学会以及新技术基金会联合赞助。届时,约4000名来自世界各地的机器人、自动化系统及人工智能等领 域的领军人物、顶尖研究团队代表及企业界人士将齐聚澳门,襄此盛会,共同探索智能机器人与系统领域的前沿科技,分享并讨论相关领域的最新进展。
IROS 2019将包括主题演讲、技术报告、研讨会、竞赛、论坛和展览等部分。终生机器视觉数据集全球挑战赛属于IROS 2019竞赛环节。
聚焦机器视觉前沿领域,旨在通过比赛探索,赋予AI终生学习能力。
人类:持续从环境和经验中学习知识和技能
机器人:需要终生学习能力以适应变化的环境和任务
计算机视觉:从预先建好的数据集中一次性学习
近年来,如ImageNet和COCO等大型数据集的新进展使得基于深度学习的计算机视觉技术显著提高。目前基于大量数据集的物体检测,分割和识别的计算机视觉应用也在智能家居、安防、工业检测等领域做出了突出的贡献。然而,机器人视觉对于视觉算法的开发和落地提出了新的挑战。计算机视觉算法隐含地对数据进行了独立同分布的假设,比如固定的类别,和单一简单的任务。 很明显,真实环境的语义概念会随着时间的推移而动态变化。在实际应用的场景中,机器人需要长时间持续运行在可变的环境中,这就需要机器人拥有终身学习的能力去适应环境的改变。
Lifelong SLAM - 适应场景变化的定位算法


为配合本赛事,研究人员制作发布了全新的SLAM数据集——OpenLORIS-Scene。与以往SLAM数据集相比,OpenLORIS-Scene中包含的场景更贴近生活,传感器配置更丰富,并且对每个场景多次录制,从而包含真实生活导致的场景变化。OpenLORIS-Scene数据集将成为SLAM算法能否支持机器人真实部署的试金石。
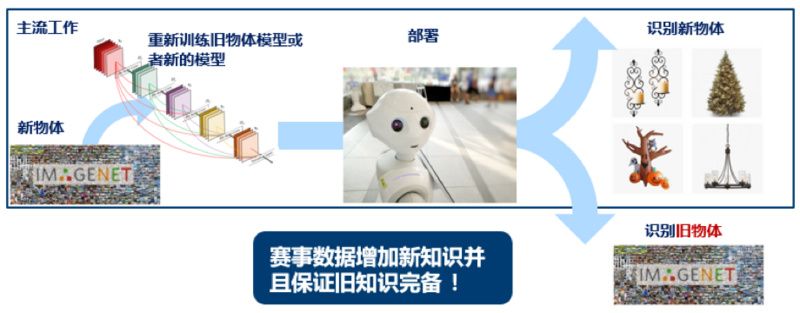
Lifelong Learning - 持续学习增加新知识
针对终生机器视觉中的SLAM和机器学习研究,赛事主办方制作了全新的数据集——OpenLORIS,用于相应算法的研究和测试。OpenLORIS数据集全部采集自日常生活场景,是全球首个包含室内场景变化的大规模数据集。

OpenLORIS-Scene与已有场景数据集对比

OpenLORIS-Object与已有物体数据集对比

本赛事为IROS会议正式竞赛单元;
本赛事将直接面向超过4000名机器人和人工智能行业与会专家;
终生SLAM(同时定位与建图)算法赛道——比拼机器人通过视觉进行持续自我定位的能力
终生物体识别算法赛道——比拼机器人在不忘旧知识的同时学习新知识的能力
预计每项挑战将有数十组来自全球学术界和工业界的队伍参赛
目前已报名的研究组来自:MIT / 帝国理工 / 清华大学 / 香港科技大学 / 澳门大学 / 麦吉尔大学 / Heriot-Watt U / U Zaragoza / Tel Aviv U / 印度科学院 / 梅赛德斯奔驰 / 驭势科技 / ...
数据集发布 2019/7
初赛 2019/7/15 – 2019/9/30
决赛 2019/10/1 – 2019/10/25
现场活动 2019/11/4
地点:中国澳门威尼斯人酒店
基于OpenLORIS数据集,英特尔中国研究院、清华大学、香港城市大学的研究者共同发起Lifelong Robotic Vision挑战赛。该赛事与机器人学顶级会议IROS 2019共同举行,包括Lifelong Object Recognition和Lifelong SLAM两大挑战。两项挑战当前均正进行为期两个月的算法比拼,全球研究者均可注册比赛后下载数据并上传算法结果进行在线评分,优胜者将受邀参加决赛,并在IROS 2019现场研讨会作报告。本届竞赛研讨会将于11月4日在澳门举行,除赛事优胜者报告外,还邀请到北京大学陈宝权教授、德国汉堡大学张建伟教授、意大利IIT研究中心Giorgio Metta教授等知名学者作现场报告并参与讨论。
更多详情,请访问lifelong-robotic-vision.github.io/competition


