或于ToF“刚正面”, FMCW会是激光雷达的未来方案?


据麦姆斯咨询介绍,激光雷达(LiDAR)是一种利用激光来测量物体之间距离的遥感方法。激光雷达根据不同类型可以通过闪光快照(flash)或扫描来提供周围环境的三维(3D)点云图,因此,有望帮助自动驾驶汽车更快、更好的决策,并改善导航来提高自动驾驶汽车的安全性。
目前,激光雷达导航系统一直依赖于被称为飞行时间(Time-of-flight, ToF)的第一代脉冲技术。脉冲ToF激光雷达通过发射强大的光脉冲,并测量从物体反射回来的光子的往返时间来实现障碍物探测。

夜间ToF激光雷达工作原理
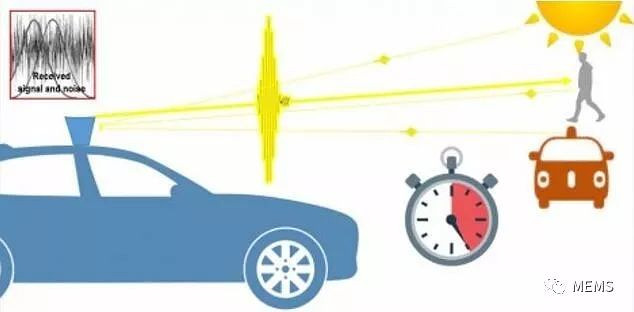
ToF激光雷达在日间及其它激光雷达同时工作时的状况
ToF激光雷达在夜间的运行效果很好,但是在日光明亮的白天,来自太阳的光子会干扰信号,从而在接收信号中产生噪声。此外,在附近有多个ToF激光雷达同时工作时,ToF系统可能会由于从其他激光雷达系统接收到的脉冲干扰而完全无法工作。为了解决这些问题,一些ToF激光雷达供应商开始通过将发射信号分成多个脉冲来引入编码技术。但是,测距性能与系统的峰值功率成正比,将可用能量分成多个脉冲会导致测距性能的下降。
人眼安全问题
此外,目前大部分ToF激光雷达系统的工作波长为850 nm和905 nm,非常接近可见光谱。

激光雷达常用波长示意图
人眼安全问题很重要,它限制了系统的功率和探测范围。此外,在850 nm~905 nm波段有明显的太阳辐射,会在日光下带来干扰。更好的波长选择是1550 nm,其人眼安全性相对高40倍,并且不容易受到日光干扰。
激光雷达必然会像雷达一样向相干探测方案发展。与发射简单的脉冲不同,相干探测发射并依赖于低功率频率啁啾。
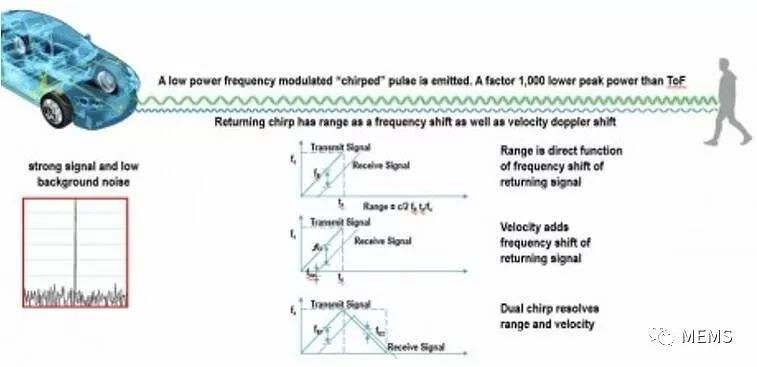
该图说明了FMCW激光雷达的主要工作原理。低功率发射啁啾(绿色)信号到达物体反射,返回啁啾(蓝色)信号之间的频移与物体的距离和速度成比例。向上和向下的啁啾用于解析距离和速度值。
反射啁啾以频移形式包含了测量点的距离信息。如果测量点也具有径向速度,则反射啁啾会增加多普勒频移。
利用上/下啁啾可以使相干激光雷达同时解析每个像素的距离和速度。ToF激光雷达无法即时分辨速度。而速度,是关于车辆周围行人和物体的非常重要的环境信息。
面向未来的FMCW激光雷达
基于FMCW的相干激光雷达技术可以实现更高的探测灵敏度和精度。对于FMCW激光雷达,信噪比与发射光子总数成比例,而非峰值激光功率。由于FMCW激光雷达具有高出10倍以上的灵敏度,因此其发射平均功率可以比脉冲ToF激光雷达低1000倍。
FMCW激光雷达的光子电路将一部分出射相干激光与接收光混合。这提供了一种独特的“解锁钥匙”,可以有效阻止任何背景辐射或其它激光雷达的干扰。
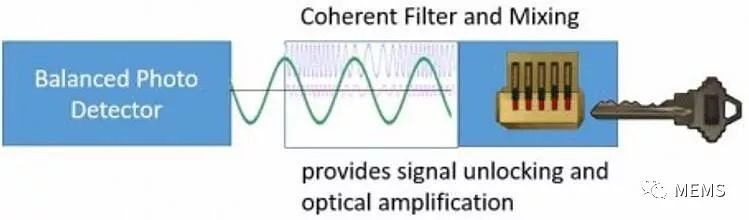
该图说明了相干放大的概念。从蓝色发射信号分出来的本振光(LO)与紫色弱接收信号发生相长干涉,并产生新的绿色强拍频信号。然后,强拍频信号被反馈到光电探测器并被检测。通过对接收波形进行快速傅立叶变换来获取距离信息。
FMCW vs ToF
FMCW与ToF激光雷达相比,还有一些其他突出优势:
ToF激光雷达的最大测距距离受到人眼安全标准的限制。在自动驾驶情况下,非常需要具有对距离200 m以上低反射率物体(例如,前方道路上的深色物体)的探测能力,以给自动驾驶车辆足够的时间执行规避操作或简单地制动。目前,市场上还没有一款近红外ToF系统能够实现200 m距离对5%反射率物体的探测。
未来,预计激光雷达传感器将会像如今的雷达传感器一样普及。但是,ToF激光雷达很容易受到多系统干扰。ToF激光雷达探测器可以检测到双脉冲,或在其他激光雷达系统存在的情况下很容易饱和。相比之下,正确应用FMCW技术时,FMCW激光雷达可以做到无干扰,因为它只允许自身的相干光通过滤波到达探测器。
并且,FMCW激光雷达的每个像素都包含速度信息(4D感知),为自动驾驶系统提供了更清晰、更安全的环境感知能力。FMCW测量可以返回每个像素的径向速度,从而有效提供4D图像。而在ToF测量系统中,像素速度信息需要后续测量,由于运动模糊,这些测量通常很难提取。
此外,只有利用FMCW技术在短波红外(SWIR)波段才能将所有元件集成在单个光子芯片上,以达到使该技术真正大众化所需要的成本目标,这可能是目前FMCW技术最重要的优势。首先,片上波导在这些波长(例如1550 nm)下是透明且低损耗的。其次,FMCW方案的激光峰值功率水平在100 mW范围内,而ToF激光雷达则为数百或数千瓦。另外,光子集成还可以利用光学相位阵列实现固态光束操纵。
目前全球大约有一百多家激光雷达开发商,并且这个数字还在持续增加。但是,其中仅有不到10家公司在专注开发FMCW激光雷达。另外,迄今为止只有一家公司展示了自己的激光雷达硅光子芯片。

据麦姆斯咨询此前报道,美国硅光子创业公司SiLC Technologies的硅光子集成FMCW激光雷达芯片可以提供每个测量像素的深度和速度数据。(左侧是场景的可见光摄像机图像,中间和右侧分别是深度和速度点云图。)SiLC Technologies的团队利用其在硅光子学领域20多年的积累和专有工艺技术,正在研究将激光器、相干探测引擎和探测器集成到一颗单芯片上。
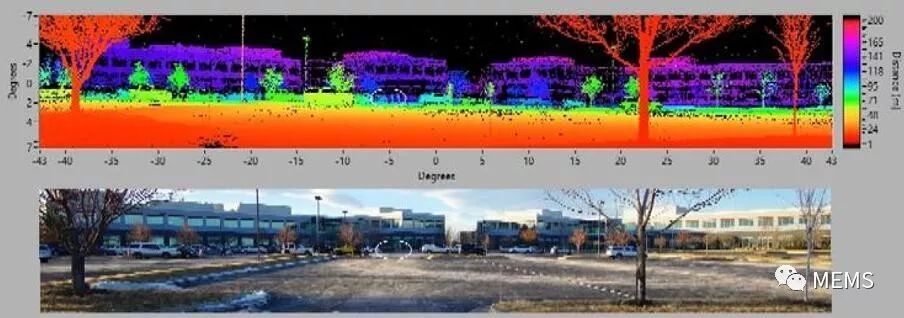
基于光子芯片的高速波长扫描激光技术企业Insight LiDAR公司,在2019年消费电子展(CES)上正式推出了Digital Coherent LiDAR激光雷达(上图为该激光雷达全速扫描获得的原始成像)。这款激光雷达基于灵敏度更高的FMCW探测技术,对于低反射率(反射率<10%)物体,探测距离最高可达200米;对于汽车车身、树木或其它障碍物,最大探测距离可达250米。
此外,市场上目前主攻FMCW激光雷达的其它代表性厂商还有Blackmore、Aeva以及Bridger Photonics等公司。他们都分别获得了宝马风险投资、丰田风险投资和蔡司等产业链巨头的投资。


