一文了解激光测距


据麦姆斯咨询介绍,1960年世界上第一台红宝石激光器问世不久,以精密测距为主要目标的激光测距(Laser Ranging)技术便随之诞生了。激光测距最早是在军事上得到运用,随后凭借其抗干扰能力强、精度高等优势,在航天航空、建筑测绘、风电行业、智能交通、工业制造等多个领域都发挥着巨大的作用。
随着工业自动化和机器视觉的快速发展,在检测、测量和控制等诸多应用中,激光测距已被证明为一种非常重要的非接触式检测手段。同时,激光测距作为激光测速、激光跟踪、激光三维成像以及激光雷达(LiDAR)等高端技术的前提,正受到越来越广泛的重视。麦姆斯咨询将重点介绍和讨论一下当前主流的几种激光测距法。
1. 激光测距法分类
根据基本原理,实现激光测距法可分成两大类:飞行时间(ToF)法和空间几何法,如图1所示。其中,飞行时间法测距又包括直接ToF法(脉冲式)和间接ToF法(相位式);空间几何法主要包括三角法和干涉法。

图1 激光测距法分类
2. 脉冲式激光测距——直接ToF法
脉冲式激光测距是激光技术最早应用于测绘领域中的一种测距方法,其通过直接测量发射光与接收光脉冲之间的时间间隔,获取目标距离的信息,如图2。测量距离可表示为:

式中D为所测量的距离,c为光在空气中传播的速度,∆t为激光束从发射到接收往返的时间。

图2 脉冲式激光测距原理图
脉冲激光的发射角小,能量在空间相对集中,瞬时功率大,利用这些特性可制成各种中远距离激光测距仪、激光雷达等。不过,由于脉冲式激光测距法通过一个高频率的时钟驱动计数器对收发脉冲之间的时间进行计数,这就使得计数时钟的周期必须远小于发送脉冲和接收脉冲之间的时间才能够保证足够的精度,因此这种测距方法不合适短距离测量。
目前,脉冲式激光测距广泛应用长距离且对精度要求不高的测量,比如地形地貌测量、地质勘探、工程施工测量、飞行器高度测量、人造地球卫星相关测距、天体之间距离测量等,如图3。
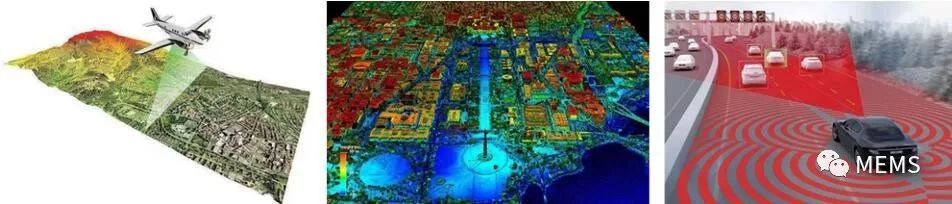
图3 脉冲式激光测距的应用
3. 相位式激光测距——间接ToF法
相位式激光测距利用无线电波段的频率,对激光束进行幅度调制并测定调制光往返一次所产生的相位延迟,再根据调制光的波长,换算此相位延迟所代表的距离。该方法通过测量相位差来间接测量时间,因此也被称为间接ToF法。

图4 相位式激光测距示意图
如图4,假设调制的频率为f,调制的波形λ=c/f,c为光速,测得调制光波信号在距离D上往返传播所形成的相移为∆φ,那么可计算出激光在测量点与目标间的往返时间∆t=∆φ/2πf,所以得到被测距离D为:

但是,当目标距离D增大时,相位延迟的值有可能大于正弦调制光波的一个周期,即∆φ=2π(N+∆N),N和∆N分别为周期的整数部分和小数部分,所以此时被测距离D为:

其中,L=c/2f=λ/2称为测尺长度,相位测距可形象地认为用长度为λ/2的尺子去量距离D,只要确定N和∆N就可求得距离。小数部分∆N可以测量获得,但N并不是一个定值,从而引起多解值问题。为解决这一问题,必须采用多个频率的调制光波信号来测定同一距离,该频率在相位测距中也称为测尺频率。如果被测距离小于测尺长度,N=0,则解值唯一。在测相精度一定时,测尺频率越低,测距误差越大,这在高精度测距中是不允许的。与之相反,选择的测尺频率越高,虽然测量精度提高,但此时的N值将大于1,存在多解问题,为解决这一矛盾,在实际应用中通常选择一个决定仪器测距精度的测尺和决定测程的几个辅助测尺,分别称之为精测测尺和粗测测尺,两者结合来获得高精度的测量。
相位式激光测距测量精度可达(亚)毫米级,测量范围从分米到千米,因而被广泛应用于中短程测距。

图5 相位式激光测距的应用
4. 多波长干涉激光测距
干涉法测距是经典的精密测距方法之一,根据光的干涉原理,两列具有固定相位差,而且有相同频率、相同的振动方向或振动方向之间夹角很小的光相互交叠,将会产生干涉现象。

图6 干涉法激光测距原理图
如图6,为常用的迈克尔逊干涉仪的原理示意图。由激光器发射的激光经分光镜分成反射光S1和透射光S2。两光束分别由固定反射镜M1和可动反射镜M2反射回来,两者在分光镜处汇合成相干光束。则合成的光束强度I为:

当距离D=mλ(m为整数)时,合成的光束振幅最大,光强最大,形成亮条纹;当D=(2m+1)λ/2时,两束光的相位相反,二者振幅相抵消,光强最小,形成暗条纹。干涉法激光测距就是根据这一原理,把明暗相间的干涉条纹由光电探测器转化成电信号,经过光电计数器计数,从而实现对距离和位移的测量。
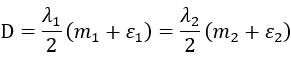
由于激光的波长λ单一且极小,干涉法激光测距的分辨率可达nm,精度极高。但上述这种传统的激光干涉测距技术仅测量相对位移而无法获得目标的距离信息,同时为保证连续测量的精度,要求目标必须沿固定导轨移动且光路不能中断。另外,由干涉原理可知该测量技术只能得到0到2π范围内的相位值,且考虑到激光往返距离,相当于只能测量λ/2范围内的距离变化,更大范围的待测距离将因无法确定相位的2π倍数而使测量结果不确定。这个λ/2范围通常被称为激光绝对距离测量的不模糊范围。如下式:

其中D为被测距离,m和ε为被测距离内包含的干涉条纹整数级次和小数级次。小数级次可以通过测量获得,而m为不定值。
为了解决这一矛盾,通常采用多波长干涉的方法,以达到高分辨率和扩大非模糊范围的要求。多波长干涉测量技术基本原理是用小数重合法及在其上发展合成波长的概念。
多波长干涉测距法(MWI)始于上世纪70年代初美国科学家Wyant及Polhemus等人进行的双波长干涉试验。该方法使用两束波长不同的激光λ1、λ2对未知距离同时进行干涉测量,带入上式被测距离D中:
两式求解,则有:

其中

若将该合成波长视作测距波长,其对应未知距离的相位信息为原有两波长的测距相位之差,以此可求解未知距离。并将距离测量的不模糊范围扩大到二分之一合成波长。从式中可知合成波长一定大于λ1和λ2。
同理,为兼顾测量范围与测量精度,该方法以多测尺思想可以进一步发展,使用多波长激光同时进行距离测量,生成多级不同尺度的合成波长。其中最长的合成波长用于实现最大的测量范围,将其得到的测距结果作为较短合成波长的距离参考值,从而对这一级合成波长的测距结果进行解算,以此递推最终实现利用最大和最小的合成波长进行大范围、高精度的距离测量。
但该方法需要多个波长的激光,这意味着需要多个激光光源。考虑到每个激光光源都需要各自的激光稳频装置,同时多束激光需要高精度的光学合束,整套激光绝对距离测量系统结构较为复杂,系统的可靠性和精度必然受到一定程度的影响。
5. 调频连续波激光测距
调频连续波(FMCW)激光测距是另一种可以实现绝对测量的干涉测量方法,它结合了光学干涉和无线电雷达技术的优点。调频连续波测量的基本原理就是通过调制激光束的频率来实现干涉测量。一般是利用输出激光束的频率随时间变化的激光器作为光源,以迈克尔逊干涉仪作为基本的干涉测量光路,根据参考光和测量光经过的光程不同而产生频差信息,提取信号再经过处理就可得到两束光的距离信息,实现绝对距离的测量。
以锯齿波调制为例,它是频率随着时间成锯齿形线性变化的正弦信号,测量光与参考光的瞬时频率随时间的变化曲线,如图7。

图7 锯齿波调频激光测距原理图
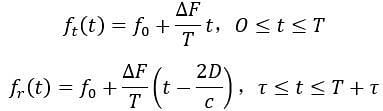
设参考光的频率为ft,测量光的频率为fr,调制宽带为∆F,调制周期为T,距离为D,测量光由于传输路径的不同相对于参考光会有一个时间延迟为τ,其中ft在f0和fm之间按锯齿波成周期性变化,那么ft和fr的表达式如下:
那么产生的拍频信号为fIF为:

所以被测距离:

调频连续波激光测距以激光为载体,所有环境干扰仅仅影响测量信号的光强,而不会影响频率信息,因此能获得较高的测距精度和较强的抗环境光干扰能力,精度可达到微米级,是目前大尺寸高精度测量应用中的研究热点。不过该测量方法对激光束频率的稳定度、线性度的要求很高,从而使得系统的实现较复杂,而且测量范围受周期T的限制,无法做到很大。
6. 三角法激光测距
三角法激光测距即光源、被测物面、光接收系统三点共同构成一个三角形光路,由激光器光源发出的光线,经过准直透镜聚焦后入射到被测物体表面上,光接收系统接收来自入射点处的散射光,并将其成像在光电探测器敏感面上,通过光点在成像面上的位移来测量被测物面移动距离的一种测量方法。

图8 三角法激光测距示意图
按入射激光光束与被测物体表面法线的角度关系,一般分为斜射式和直射式两种测距方式,如图8。总体来讲,直射式激光三角法在几何算法上比斜射式更为简单,误差也相对小,且体积可以设计得更为紧凑小巧,在工业中多采用直射式激光测距。
相比相位式激光测距和调频连续波激光测距,三角法激光测距具有结构简单、测试速度快、使用灵活方便、成本低等诸多优点,不过三角法激光测距的精度会随着距离的增加逐渐变差,而且由于激光三角测距系统中,光电探测器接收的是待测目标面的散射光,这种测距方式一般适合室内近距离工作,而不适合在户外强光背景或者室内强光背景下工作。因此三角法激光测距应用范围主要是小位移的测量,广泛应用于物体表面轮廓、宽度、厚度等量值的测量,例如汽车工业中车身模型曲面设计、激光切割、扫地机器人等。

图9 三角法激光测距的应用
最后小结,每一种测量技术在测量精度、测量速度、测量范围、体积成本、系统复杂度等方面各有优势,而在实际应用中,需要根据具体的应用场景,在满足所需测量的精度和范围时综合成本、操作最方便等因素,选择最合适的测量方法。


